

- 店长推荐
- 店铺热卖









店铺新品




- 热门商品
- 热门关注
- 商品介绍
- 规格与包装
- 售后服务
- 商品评价(1)
联系王工:18611159515 获取更多机械手产品:www.gantries.cn
今天小编为大家介绍一下吊装六轴搬运机械手的设计情况,后面再详细说一下该桁架机械手的日常保养事项。
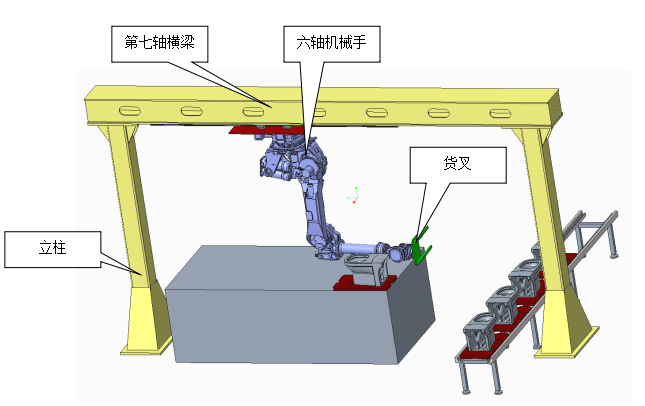
吊装六轴搬运机械手设计
本桁架机械手整体实施方案是立柱、横梁、六轴机械手、电气控制系统等组成。
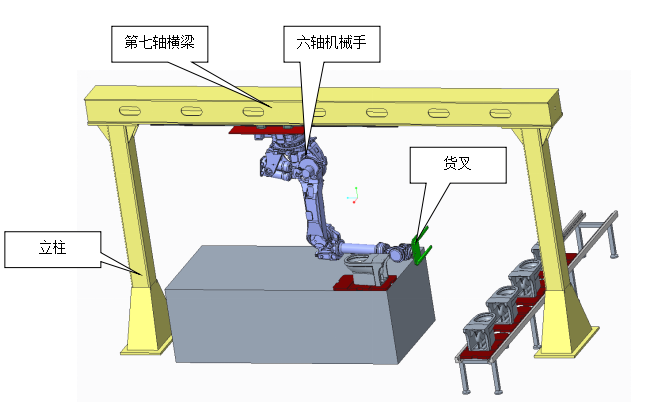
桁架机械手设计要点:
①横梁刚性及变形;②机械手可达位置仿真。
吊装六轴搬运机械手的技术参数:
物品重量:50kg
抓取位置:底部
第七轴行程:4000mm
第七轴速度:0-20m/min
码垛机采用安川六轴码垛机器人
额定载荷:约100kg
幅度:约2.2m
环境温度:5℃~45℃
平均相对湿度:30%~50%
吊装六轴搬运机械手的日常保养:
一、使用前检查
为了保证该桁架机械手设备能够正常运转,放置设备运行时出现损坏,使用吊装六轴搬运机械手前必须进行检查
1.六轴搬运机械手附加轴部分
a.直线导轨是否有破损生锈,表面油脂是否已涂覆,导轨上是否有妨碍导轨滑动的异物。
b.齿轮齿条是否有磨损,安装螺栓是否松动,表面油脂是否涂覆。
c.机械限位止档是否损坏。
2.六轴搬运机械手货叉部分
a.各部位螺栓是否松动。
b.货叉上胶皮垫是否磨损。
c.叉齿是否平直。
3.机器人
a.机器人是否正常。
4.机构归零
检查各机构是否已归零,行程范围内是否有障碍物。
二、开机后检查
为防止吊装六轴搬运机械手运行时出现程序上的故障或电气限位失效,必须在开机后对程序进行自检,电气限位是否安全有效。
1.程序自检
2.限位开关触发检测
三、设备启动后检查
防止前面检查发现不了的异常影响该桁架机械手设备正常运转,需进行启动后检查。
1.检查吊装六轴搬运机械手各机构有无异常震动和噪声。
2.桁架机械手各操作手柄和开关位置是否正确。
四、运行时检查
为确保生产正常进行,需在吊装六轴搬运机械手运行时检查1-3各工作循环
1.该桁架机械手设备动作是否符合设计逻辑。
2.各机构定位是否出现偏差,影响生产。
3检查六轴搬运机械手各机构运行中是否有异常响声。
五、停机后检查
确认所有设备断电,各手柄归零,桁架机械手各机构位置归零。
六、定期检查
见设备吊装六轴搬运机械手使用维护手册。
规格与包装
售后服务
商品评价
- 全部评价(1)
浏览
3601